परासमापी (Range Finder) प्रकाशीय यंत्र है, जिसकी सहायता से सुदूर स्थित लक्ष्य (target) का परास ज्ञात किया जाता है। आजकल परासमापन की अनेक विधियाँ प्रयुक्त होती है। प्रकाश से अधिक तरंगदैर्ध्य (wavelength) वाली विद्युच्चुंबकीय किरणों के प्रयोग से रेडार द्वारा परासमापन किया जाता है। ध्वनि के परावर्तन के गुण तथा ध्वनि और प्रकाश के वेगों के अंतर के ज्ञान से भी दूर लक्ष्यों का परास ज्ञात किया जाता है (देखें रेडार एंव ध्वनि)।
प्रकाशीय परासमापी उच्च विभेदन (high resolution) वाले, कम स्थान घेरनेवाले तथा लघुपरिसर (short range) में सुग्राही होते हैं, किंतु अस्पष्ट दृश्य की स्थिति तथा दीर्घ परासमापन में अविश्वसनीय होते हैं और रात्रि के समय उपयोग में नहीं आ सकते। ये परासमापी सिद्धांतत: त्रिभुजन (trianglation) पर निर्भर करते हैं, जिसमें लक्ष्य त्रिभुज के शीर्ष पर होता है। शीर्ष का कोण, आधार दैर्ध्य (base length) और आधार पर बने किसी कोण के ज्ञान से लक्ष्य का परास ज्ञात होता है। त्रिभुजन की निम्नलिखित दो विधियाँ हैं।
सैनिक उपयोग में लक्ष्य विशेष रूप से अस्थिर हुआ करते हैं। तोप, बंदूक आदि से निकली क्षणदीप्ति (flash) क्षणिक होती है। इन उपयोगों में दोनों ही प्रेक्षणस्थलों पर थियोडोलाइट एक ही समय कार्य करें, यह आवश्यक है। इसलिए दोनों प्रेक्षणस्थलों के बीच इस प्रकार विद्युतीय अथवा विद्युच्चुंबकीय तरंगों का संबंध स्थापित करते हैं, जिससे एक ही प्रेक्षणस्थल से प्रेक्षक दूसरे प्रेक्षणस्थल के दूरदर्शक के कपाट (shutter) को एक साथ बंद कर सकता है। दोनों प्रेक्षणस्थलों से सूचनाएँ सैनिक केंद्र पर भेज दी जाती है, जहाँ पर लक्ष्य के परास की गणना की जाती है या लेखाचित्र (graph) खींच लिया जाता है।
प्रमुख प्रकार के दो परासमापियों की सैद्धांतिक दृष्टि से सरल रेखानुकृति चित्र १ तथा २ में दिखाई गई हैं। ये क्रमश: त्रिविमदर्शी परासमापी (Stereoscopic Rangefinder) एवं संपात परासमापी (Coincidence Rangefinder) कहलाते हैं।
चित्र १. एवं २. से स्पष्ट है कि परासमापी के दक्षिण एवं वाम भाग में दो स्वतंत्र परिदर्शी (periscope) हैं, जो क्षैतिज धरातल में कार्य करते हैं।
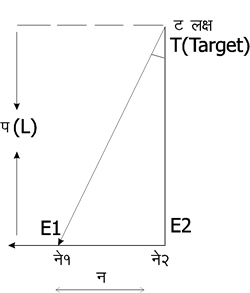
त्रिविमदर्शी परासमापी - जैसा चित्र १. में दिखाया गया है, यदि कोई लेन्स प्रयुक्त न हो तो नेत्रों की स्थिति ने१ (E1) तथा ने२ (E2) पर नेत्रों के मध्य की प्रभावकारी दूरी (effective interocular distance) बढ़कर द१ द२ (M1 M2)उ ब (b) होगी। यदि लंब बिंदु का परास प (L) हो, तो विस्थापनामास कोण E= ब/प (a=b/L), जो बिना यांत्रिक सहायता के केवल नेत्रों पर ने/प (e/L) के बराबर होता है (चित्र ३.), जहाँ ने (e)= ने१ ने२ (E1 E2)*
चित्र १. में प्रदर्शित ल१¢ (L1¢ ), तथा ल२¢ (L2¢ ) पर अभिदृश्य लेन्स (objective) एवं ला१¢ ¢ (्ख्र१¢ ¢ ) तथा ला२¢ ¢ (L2¢ ¢ ) पर उपनेत्र (eye-piece) के रखने पर विस्थापनाभास कोण दूरदर्शक के अभिवर्धन (magnification) के गुणनफल के बराबर बढ़ जाता है। यदि इस प्रकार बने दूरदर्शक का अभिवर्धन अ (m) हो तो
विस्थापनाभास कोण (देखें चित्र ३.) कउ अ ब/प (a=m b/L)।
परासमापन की दृष्टि से यंत्र के अनेक सुगम नमूने हैं। एक नमूने (model) में प्रत्येक उपनेत्र में स्लाइड (slides) या ग्रैटिक्युल (graticules) होते हैं, जिनपर भिन्न भिन्न चिन्ह होते हैं। प्रेक्षक को यह निश्चिय करना होता हैं कि लक्ष्य किस चिन्ह के तल में प्रतीत होता है। दूसरे प्रकार के नमूने में उपनेत्र की तरफ एक चिन्ह स्थिर होता है और दूसरा चिन्ह आगे पीछे की ओर सूक्ष्ममापी पेंच (micrometer screw) की सहायता से सरकाया जा सकता है। सूक्ष्ममापी पेंच की स्थिति इस प्रकार अंशांकित की जाती है जिससे सीधे ही परास की माप की जा सके।
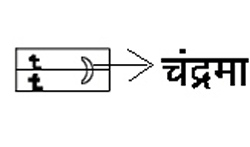
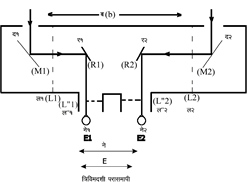
संपात परासमापी - इस प्रकार के परासमापी (देखें चित्र २.) में परावर्तकों द१ (M1) तथा द२ (M2) से बने दोनों प्रतिबिंब एक ही नेत्र से देखे जाते हैं। सरल प्रकार के यंत्रों में द१ र१ (M1 R1) यदि प्रतिबिंब का ऊपरी भाग देता है, तो द२ र२ (M2 R2) प्रतिबिंब का निचला भाग, क्योंकि र१ (R1) र२ (R2) पर जड़ा (mounted) होता है। यदि यंत्र के दोनों भाग प्रकाश की दृष्टि से एक ही समान हों, तो किसी लक्ष्य के प्रतिबिंब का ऊपरी एवं निचला भाग एक दूसरे से विस्थापित होगा। केवल अनंत पर स्थित लक्ष्य, जैसे चंद्रमा का प्रतिबिंब, दोनों प्रतिबिंबों का विभाजन करनेवाली रेखा पर मिला हुआ सा प्रतीत होगा (देखें चित्र ४.)। किसी विशेष लक्ष्य का परास ज्ञात करने के लिए एक भाग द्वारा बना प्रतिबिंब तब तक सरकाया जाता है जब तक दोनों प्रतिबिंब संपात (coincidence) में न आ जाएँ। पुराने ढंग के यंत्रों में परावर्तक (दर्पण या प्रिज़्म) को उचित दिशा में ठीक विस्थापनाभास कोण के आधे जितना घुमाकर प्रतिबिंब के भागों को संपात में लाया जाता है (देखें सेक्सटैंट)। आजकल और सुगम व्यवस्था उपयोग में लाई जाती है।
त्रिविमदर्शी परासमापी के ही समान अभिदृश्य लेन्स तथा उपनेत्र ल१¢ (L1¢ ), ल२¢ (L2¢ ), ला१¢ ¢ (L1¢ ¢ ) { = ला२ (L2¢ ¢ )} को रखने पर विस्थापनाभास कोण में वृद्धि हो जाती है।
पतले अवर्णक प्रिज़्म (thin achromatic prism) के प्रयोग से भी अर्ध-प्रतिबिंब-क्षेत्र में वांछनीय विस्थापन लाया जाता है। इस हेतु एक भाग के अभिदृश्य लेन्स ल१¢ (L1¢ ) और केंद्र के परावर्तक द्वय र१ र२ (R1 R2) के मध्य उपर्युक्त प्रिज़्म रखा जाता है। चित्र ५. में अनंत पर स्थित लक्ष्य का प्रतिबिंब प्रिज़्म की अनुपस्थिति में फा (F) पर बनता है। किसी पासवाले लक्ष्य से आनेवाली किरण को प्रिज़्म से आवर्तित कर उचित विचलन के द्वारा फा (F) बिंदु पर ही प्रतिबिंब बनाया जा सकता है।
यदि प्रिज़्म द्वारा उत्पन्न विचलन = Ð ख(d )
तथा अभिदृश्य लेन्स से प्रिज़्म की दूरी = य (x)
[ जहाँ अवर्णक प्रिज़्म के दोनों संयोजक विभागों के (m - १)ॠ का अंतर विचलन के बराबर होगा, जबकि m आवर्तनांक और A प्रिज़्म का कोण होट , तो
र = य क = (फ- य) (ख- क)
क्योंकि
क =
विस्थापनभास
कोण =![]()

 |
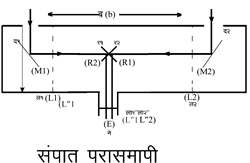 |
| चित्र १. त्रिविमदर्शी परासमापी | चित्र २. संपात परासमापी |
 |
|
| चित्र ३. |
|
बढ़ता जाएगा और जब प (L)= ¥, तब प्रिज़्म फा (F) पर होगा जो यंत्र की बनावट के अनुकूल नहीं है, क्योंकि मध्यस्थित परावर्तक इसमें बाधक होंगें। लेकिन इस समस्या से छुटकारा पाने के लिए एक दूसरा स्थिर, पतला, अवर्णक प्रिज़्म दूसरे भाग में डाल देते हैं, जिससे प्रिज़्म अनंत पर स्थित लक्ष्यबिंदु के लिए किसी निश्चित स्थिति पर दोनों विचलन संतुलित हो जाते हैं। प्रिज़्म के साथ एक मापनी लगी होती है, जो सीधे परास में अंशाकित होती है।
दोनों ही तरह के परासमापियों में परावर्तकों के स्थान पर पंचभुजीय प्रिज़्म का उपयोग करते हैं, क्योंकि नलिका के अंदर इनके घूम जाने से प्रकाश की किरणों के घुमाव पर प्रभाव नहीं पड़ता।
परासमापन की सीमा, त्रिविमदर्शी परासमापी में विस्थापनाभास कोण, क= अ ब/प, को ३०¢ ¢ , अथवा अच्छे प्रेक्षक के लिए इससे भी न्यून कोण से समतुलित करके ज्ञात कर सकते हैं। संपात परासमापी में सीमा उपर्युक्त सूत्र से ही ज्ञात कर सकते हैं, परंतु यहाँ यह नेत्र की दो रेखाओं को अलग अलग देख सकने की क्षमता, बर्नियर ऐक्युइटी (Vernier Acuity) पर निर्भर करती है। विस्थापनाभास कोण को बर्नियर ऐक्युहटी से समतुलित करके, प्राप्त समीकरण से परासमापन की सीमा ज्ञात की जा सकती है।
स्टेडियोमापी द्वारा परासमापन (Stadiometric Ranging) - ज्ञात विस्तारवाली वस्तु के छोरों एवं प्रेक्षक द्वारा बने त्रिभुज में यदि वस्तु द्वारा प्रेक्षक पर बना कोण ज्ञात हो तो त्रिभुजन से परास ज्ञात हो सकता है। स्टेडियामापी द्वारा परासमापन इसी सिद्धांत पर आधारित है। स्टेडियायष्टि (जिसपर निश्चित दूरी पर चिन्ह लगे होते हैं) को थियोडोलाइट से देखकर कोण ज्ञात करते हैं, जिससे मानक सारणियों से यष्टि का परास ज्ञात हो जाता है।
सैनिक उपयोग में स्डेडियायष्टि के स्थान पर मनुष्य, जीव, वायुयान आदि के नियत आकार का लाभ उठाकर उनका परास ज्ञात कर लिया जाता है।
(नारायण गोपाल डोंगरे)